产品和技术
工业机器人
多关节机器人
四轴SCARA机器人
六轴工业机器人
并联工业机器人
注塑装备
注塑机
注塑机配套设备
注塑机
机械手
辅机
新能源标准品
锂电池设备
动力电芯贴胶机
软包电池干燥线
电芯预热炉
EV方形卷绕机
大圆柱卷绕机
光伏设备
3C智能设备
汽车智能产线
智能物流
科研力量
研发团队
控制
伺服
视觉
解决方案
智能环境整厂解决方案
公司简介
能力资质
服务范围
专业项目
合作伙伴
自动化解决方案
自动化
解决方案
产品系列
荣誉资质
客户案例
行业方案
应用方案
案例展示
服务平台
售后服务
服务布局
四快标准
服务流程
常见问题
我要报修
投诉建议
IOT平台
总体方案
T-MES智造平台
FMCS厂务中央监控系统
EMS智慧能源管理系统
集成侠
驼驮科技
关于天博电竞(中国)有限公司官网
公司简介
企业文化
发展历程
荣誉资质
基地介绍
新闻资讯
廉洁合作
投资者关系
基本概况
公司公告
定期报告
公司治理
投资者交流
天博电竞(中国)有限公司官网
联系方式
人才招聘
在线留言
关联公司
野田智能
驼驮科技
集成侠
供应商管理系统
简体
简体
EN
繁體
搜索
控制
研发团队
控制
伺服
视觉
选择栏目
机器人控制平台
控制器
机器人控制器平台集运动控制、PLC控制和网络化控制于一体,包括主控制器、示教器、远程IO模块和PC端控制软件,硬件采用多CPU架构,具有通用性、稳定性和实时性的特点。
工艺软件编程环境符合IEC61131-3国际标准,支持EtherCAT、RTEX、MECHATROLINK、CAN等多种工业总线通信协议。机器人控制器平台可与天博电竞(中国)有限公司官网注塑机控制器实现一体化控制,集成丰富的注塑行业工艺包,有效提升注塑机与机器人协同效率。
技术规范
项目
描述
CPU Core
CortexA8 720MHz,256MB DDR3
DATA FLASH/掉电存储
512MB SDCARD/32KB FRAM
EtherCAT主站
支持DC 模式
NET0、NET1网口
2路全双工百兆网口,支持TCP/IP、ModbusTCP、OPC DA协议
CAN
支持CANOpen协议
Rs485
支持ModbusRTU协议
系统IO
4路输入,4路输出
用户IO
16路DI,16路DO,NPN方式,输入支持最多2路正交编码或两路脉冲计数
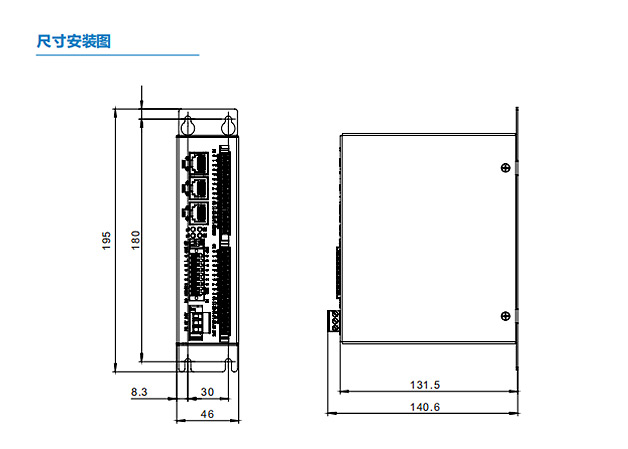
安装方式
固定孔螺丝安装
产品特点
1、高速以太网总线:基于实时以太网EtherCAT总线设计,具有高带宽、低延时和高同步性,根据用户需求可以同时支持RTEX和MECHATROLINK总线。
2、高精度控制:支持高精度纳米插补,多种类的误差补偿技术,基于动力学的速度前馈功能。
3、多轴联动插补:支持最大八轴的联动插补,最大支持三个附加轴控制。
4、易用性和定制化:支持LUA代码和G代码的混合编程,内嵌符合IEC61131-3标准的PLC模块,用户可以调用标准PLC模块进行编程。
5、丰富的运动学和动力学算法库:系统可以适配通用六关节、Delta、SCARA、四轴搬运以及各种非标结构的机器人。
示教器
示教器采用8英寸液晶屏,1024*768分辨率;基于Linux 操作系统,图形化的界面设计,对话框式的选项设定;支持触摸屏和实体功能按键操作,支持自定义功能键、模式切换钥匙开关,配备急停开关、三段使能开关,支持标准以太网、U盘等接口,用户操作可靠且高效。
技术规范
项目
描述
处理器
ARM Cortex-A7,256MB DDR3,256MB FLASH
操作系统
Linux
显示
8英寸液晶显示屏,分辨率1024*768
控制模式
触摸屏/实体按键
外部接口
1*百兆网络,1*USB HOST
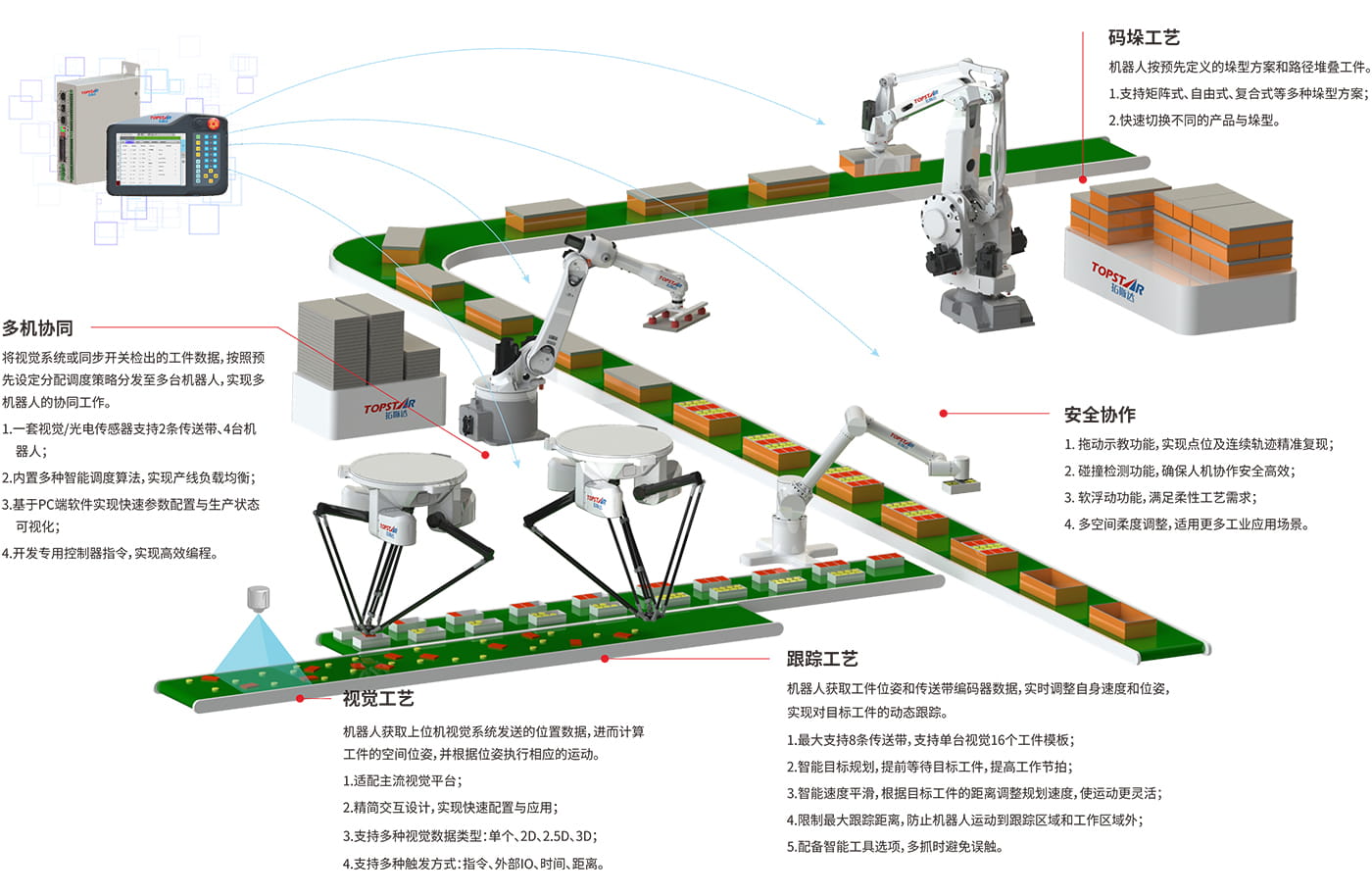
应用场景
©2024Copyright 天博电竞(中国)有限公司官网 所有版权信息.
粤ICP备15032484号
Design By Starkay
返回首页
网站地图
13058586552
在线客服
乐鱼体育
|
kb官网(中国)有限公司官网
|
欧宝APP「中国」官方网站
|
买球赛十大平台(中国)官方网站
|
米乐游戏官方注册(中国)有限公司官网
|
leyu乐鱼买球(China)官方网站
|
开云APP官网
|
欧宝APP「中国」官方网站
|
565娱乐中国有限公司
|